




Robot arm
I've wanted to build a robot hand for a long time now and finally I've found a place to get cheap servo motors; DealExtreme. I made some planning with Google SketchUp and came up with this:
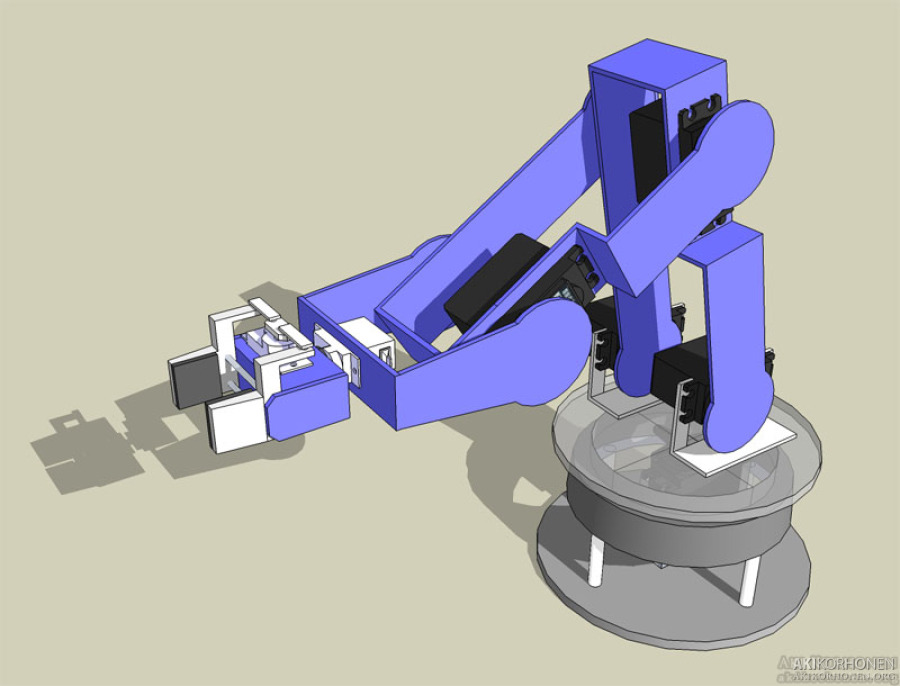
servohand_1_23052008_ak.jpg
There will be five normal sized servo motors and two mini servos. The fifth normal servo is under the translucent round piece for sideways rotation. There are two servos for the first joint because the biggest amount of torque is needed at that point. Maybe I'll find a high-torque servo for that later, dunno, I only have normal ones at hand at the moment.
The whole thing will be controlled with my own servo controller. You"ll get more information about that from here:
» My own serial servo controller project
The servo controller is attached to the serial port on the PC (or serial->usb adapter) and I already programmed a small graphical software in Java to control the robot arm via the servo controller.
Here is a video of the SketchUp model that I spiced up with SketchyPhysics 2 -plugin so I could control all parts of the arm:
More to come...